Настройка стиля съемки
1) База. В меню Настройки нажмите кнопку Стили (рис.1), выберите Новый. Для настройки Базы необходимо выбрать конфигурацию (База авто, База вручную). В строке Связь укажите УКВ встроенный, выберите тип поправок, протокол, шаг, мощность (рис. 2а), канал, угол возвышения и режим энергосбережения (рис. 2б), нажмите Сохранить (рис. 2а,б) и задайте имя для стиля.
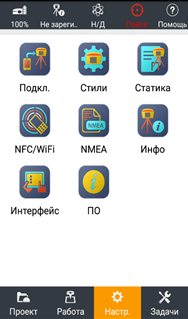 Рисунок 1 Рисунок 1 | 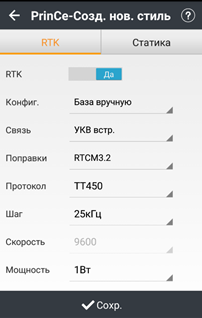 Рисунок 2а Рисунок 2а | 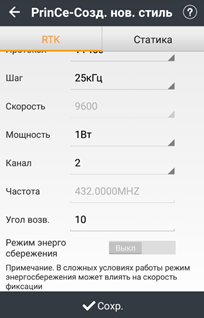 Рисунок 2б Рисунок 2б |
2) Ровер. В меню Настройки нажмите кнопку Стили, выберите Новый. Для настройки Ровера необходимо выбрать конфигурацию Ровер, в строке Связь укажите УКВ встроенный, в
соответствии с конфигурацией базы укажите протокол, шаг, канал (рис. 3а), угол возвышения, параметр PDOP, частоту получения поправок и вид ионосферы. Параметр «Нов.база?» проинформирует о подключении к новой базе. Функция «Выдача данных» используется для работы приёмника в качестве ретранслятора, функция доступна только для приёмников i-серии (рис. 3б). Нажмите Сохранить (рис. 3а,б) и задайте имя для стиля.
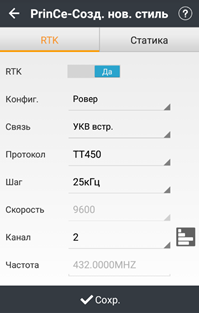 Рисунок 3а Рисунок 3а | 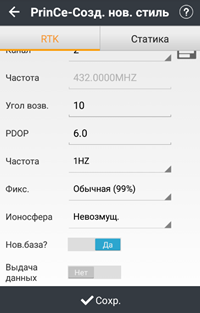 Рисунок 3б Рисунок 3б |
Применение стиля съемки
3) База. Подключитесь к базовому приемнику, если еще не сделали этого, откройте ин инструкцию по подключение к приемнику.
Выбрав созданный стиль для Базы, нажмите Применить. В открывшемся окне проверьте тип антенны, введите ее высоту с указанием способа измерения, задайте имя точке и введите вручную известные координаты базы. Либо нажмите Получить координаты предварительно выбрав способ получения («По числу измерений»: укажите сколько измерений нужно выполнить для получения координат, «По времени(с)»: в течение какого времени производить измерения в секундах), чтобы определить автономное положение базы (рис. 4).
Нажмите Ок, после чего стиль будет задан.
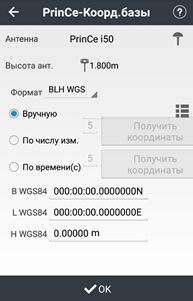 Рисунок 4
Рисунок 43) Ровер. Подключитесь к мобильному приемнику, если еще не сделали этого, откройте ин инструкцию по подключение к приемнику.
Выбрав созданный стиль для Ровера, нажмите Применить. Стиль задан. Далее необходимо дождаться фиксированного решения и начать работу.