Экспорт данных
После того как произошла постобработка данных и полученные результаты вас устраивают, необходимо выполнить экспорт. Для этого следует совершить следующее действие:
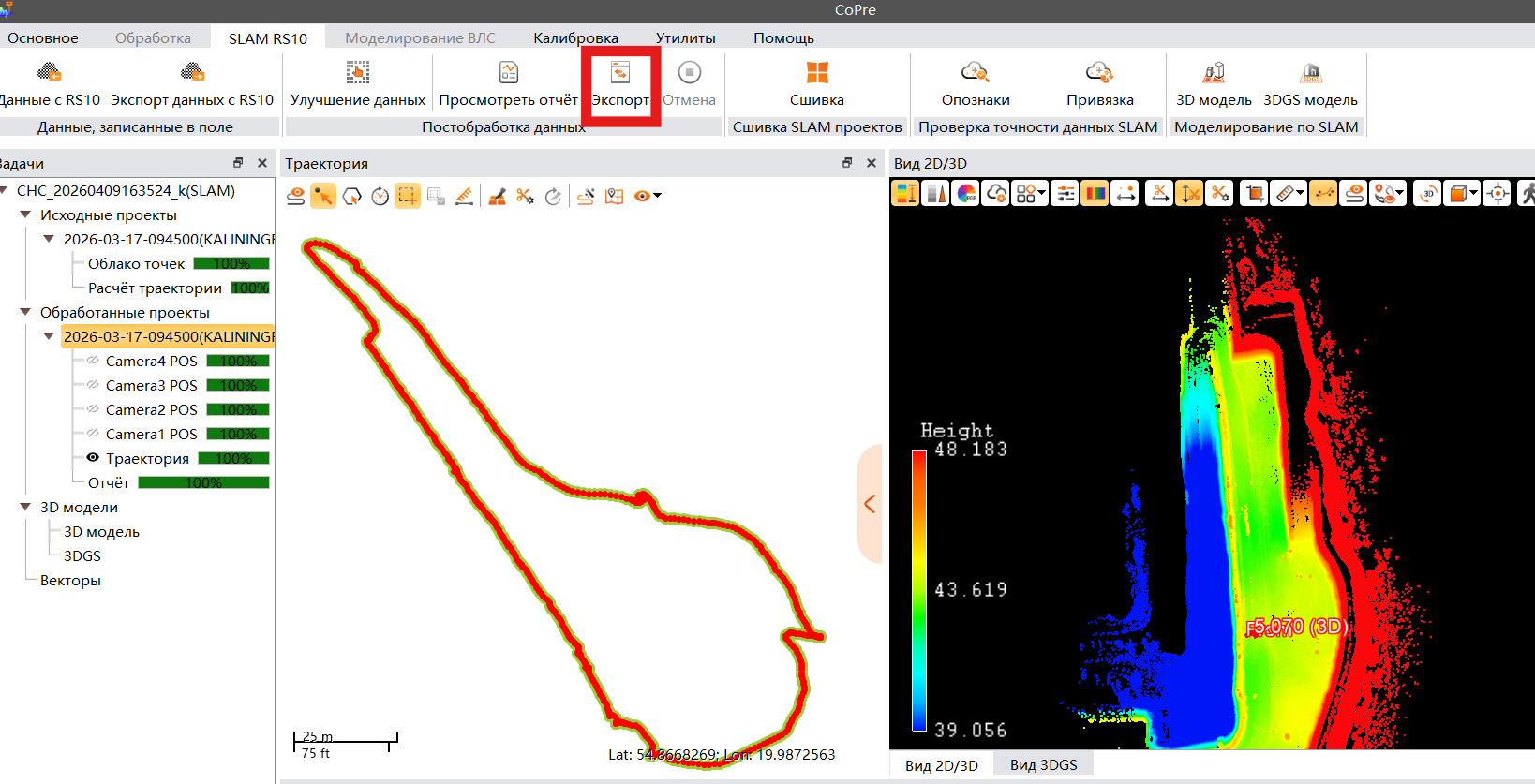
- Выберите один или несколько обработанных проектов в окне управления задачами и нажмите «SLAM RS10» → «Экспорт».
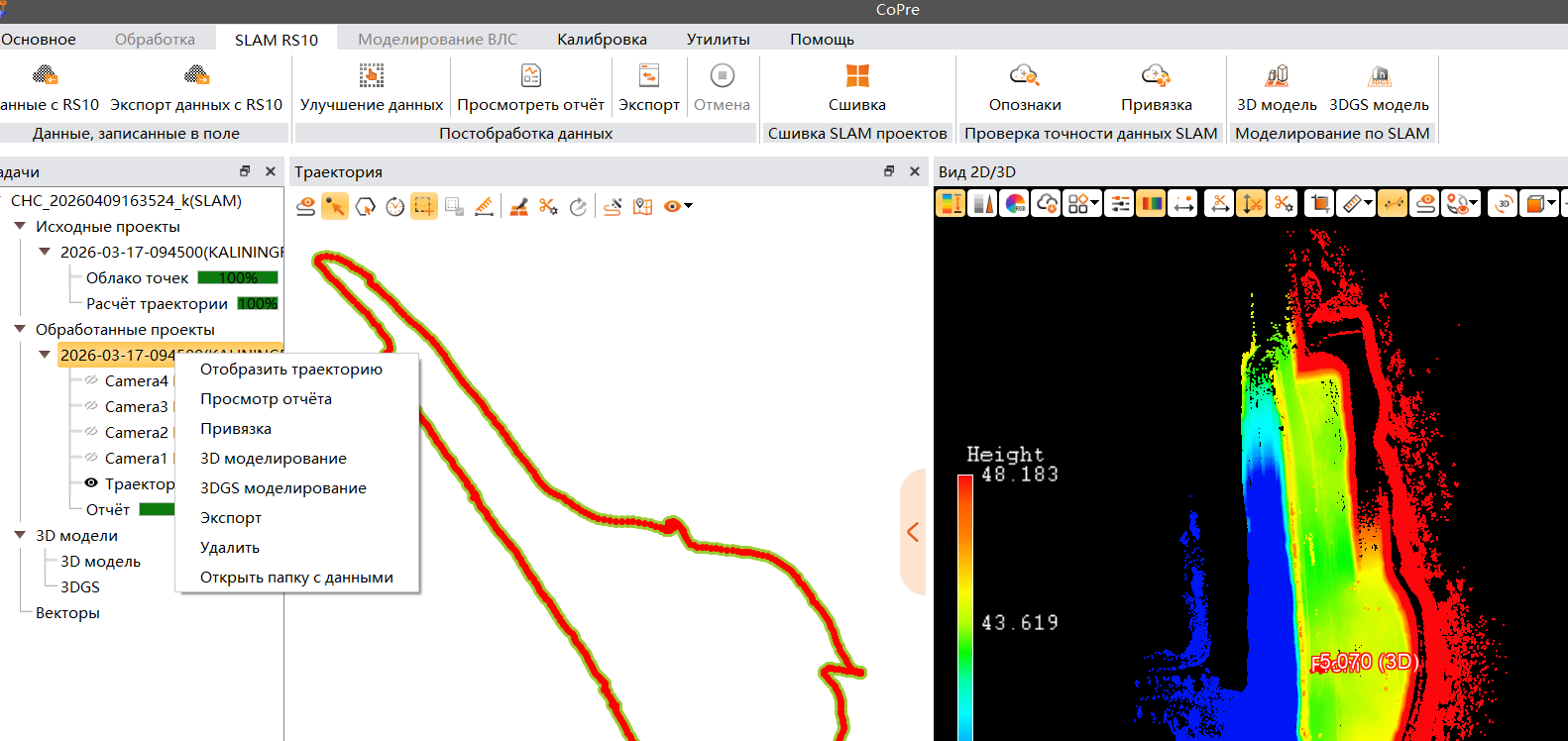
- Либо в директории задач щелкните правой кнопкой мыши по проекту и выберите «Экспорт».
Параметры экспорта данных с лидара
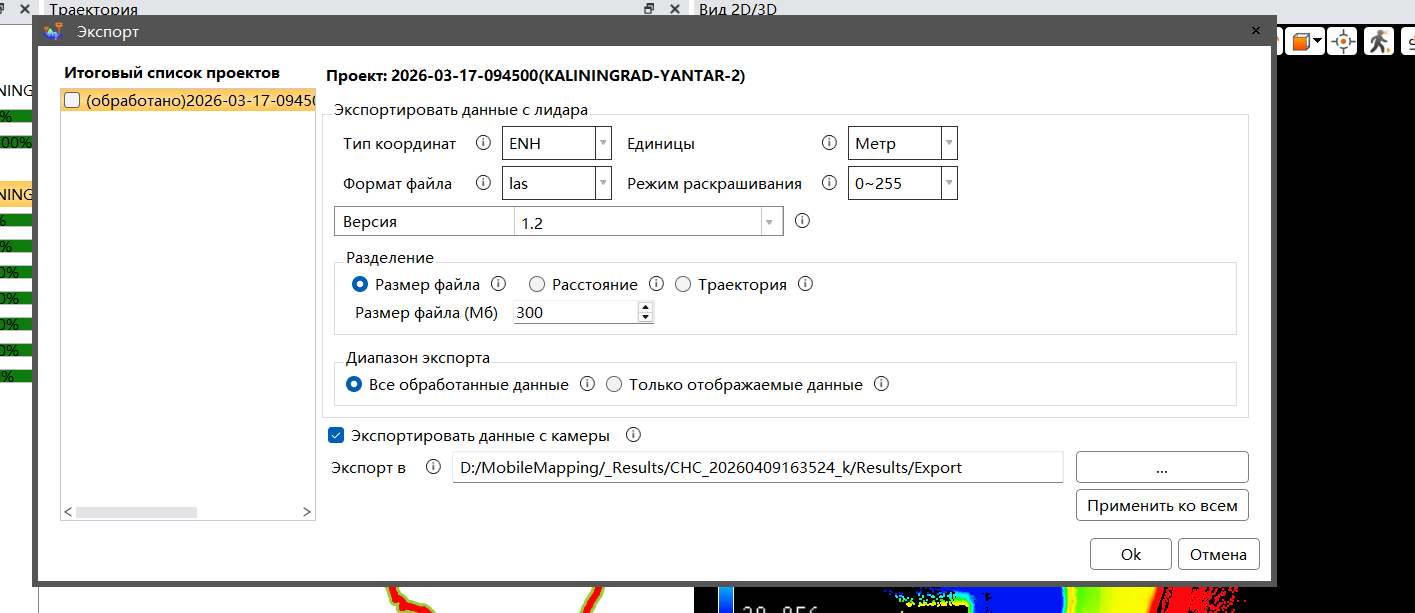
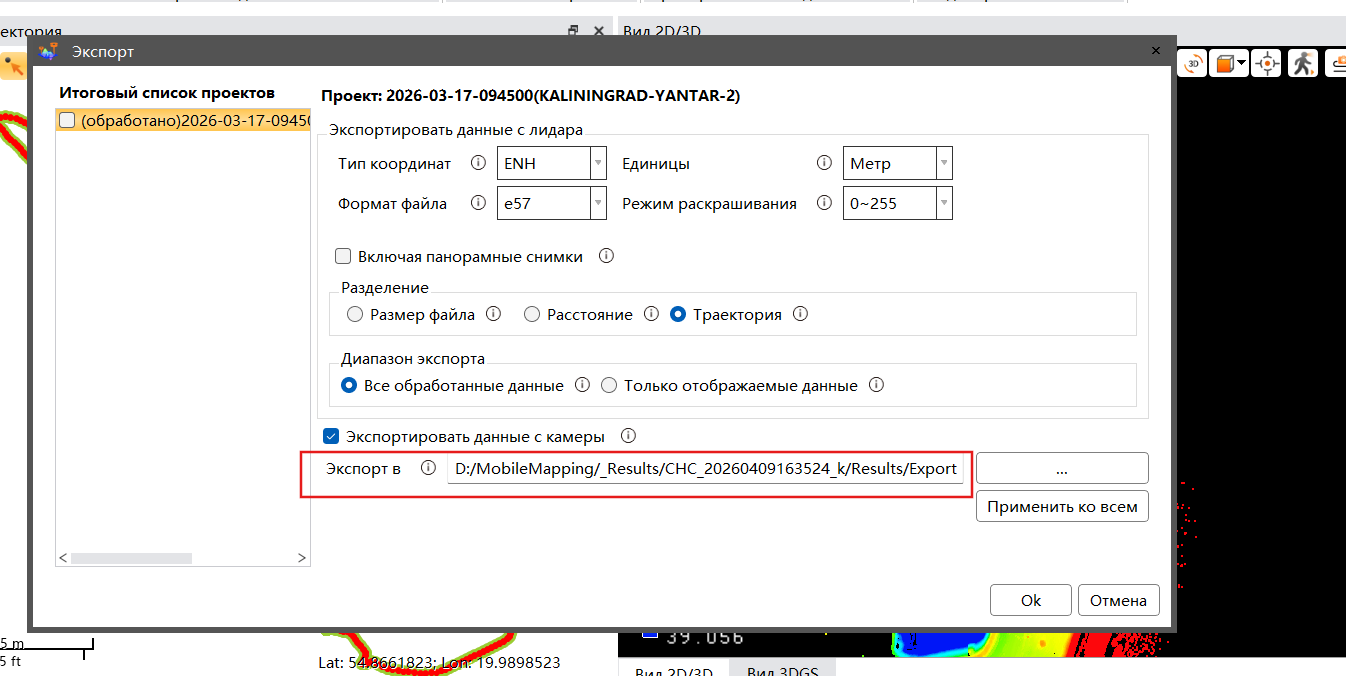
После того как вы нажали на вкладку «Экспорт», перед вами появится окно с необходимыми параметрами, которые вам нужно выбрать.
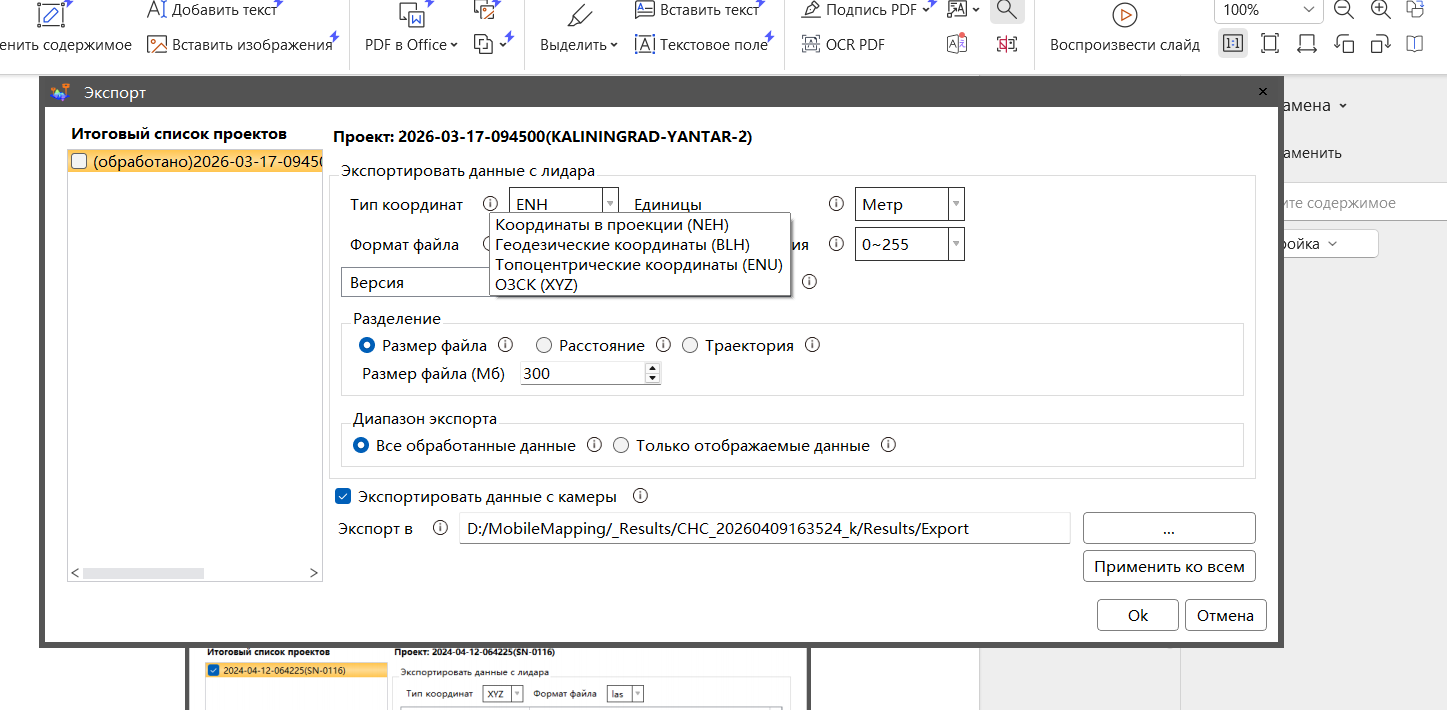
- При выборе типа координат доступны следующие варианты:
- Координаты в проекции (NEH), то есть в местной системе координат;
- Геодезические координаты (BLH), это глобальные координаты: широта, долгота и высота;
- Топоцентрические координаты (ENU), они же локальные;
- ОЗСК (XYZ), они же геоцентрические прямоугольные координаты.
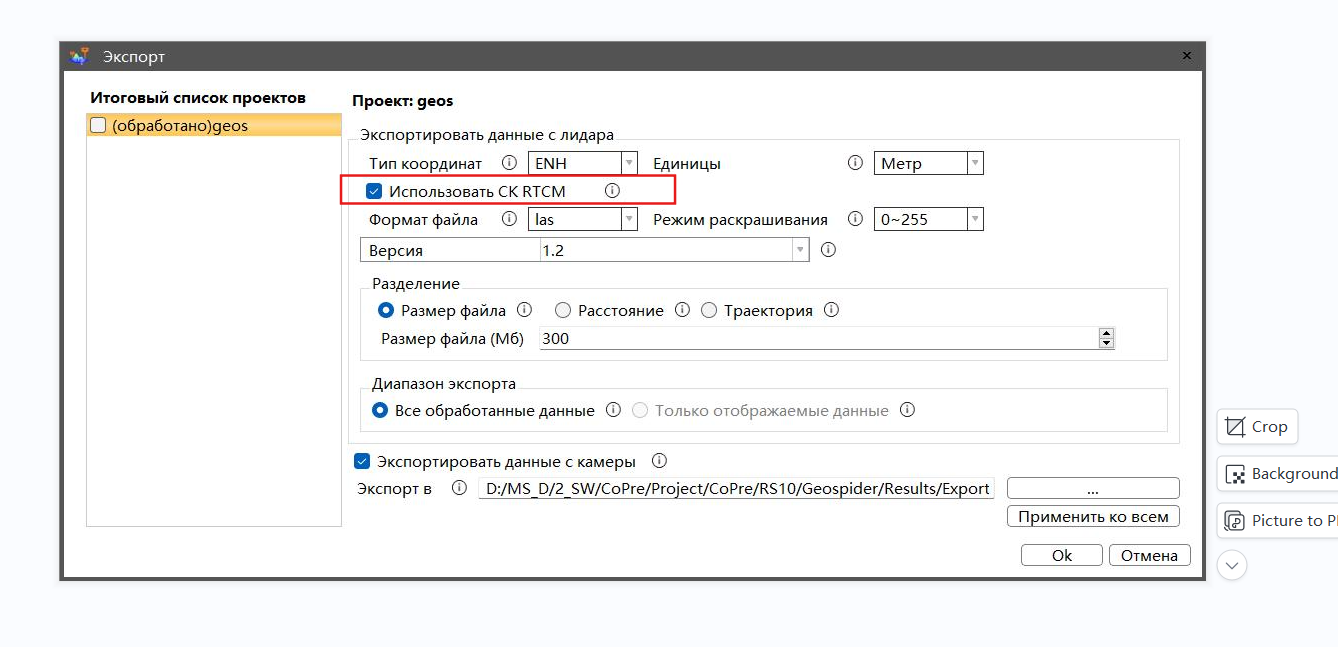
- В случае если вы работали с форматом поправок RTCM, доступен экспорт в системе координат RTCM.
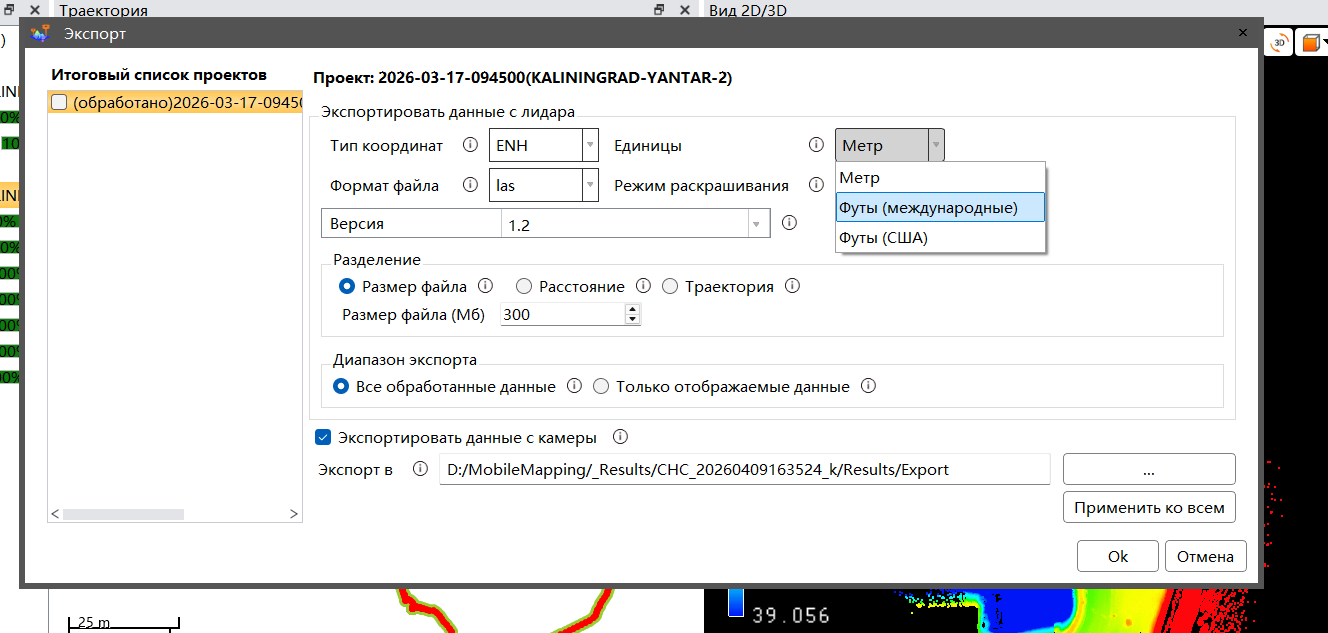
- При выборе единиц доступны следующие варианты:
- Метры;
- Футы (международные);
- Футы (США).
- Формат файла облака точек можно выбрать из следующих вариантов:
- las;
- laz;
- e57;
- pts;
- rcp.
Более подробную информацию о форматах вы можете прочитать в этой статье:
support.prin.ru/knowledge_base/item/371349?sid=73398
- Режим раскрашивания может быть следующий:
- 0⁓255;
- 0⁓65535.
Отличия этих режимов в качестве передачи раскраски облака, как пример режим 0⁓255 передает меньше оттенков RGB, чем 0⁓65535. Однако, некоторый софт воспринимает цвета только в градациях 0-255, например старые версии Agisoft Metashape и ArcGIS.
- Версия файла доступна только для форматов las и laz, для экспорта доступны следующие версии:
- 1.2;
- 1.3;
- 1.4.
Они расположены от более старой к современной:
- Если вам нужна максимальная совместимость с любым ПО (включая очень старые версии) — используйте LAS 1.2.
- Если вы работаете с современными данными (мобильное сканирование, большие объемы, много классификаций) — используйте LAS 1.4.
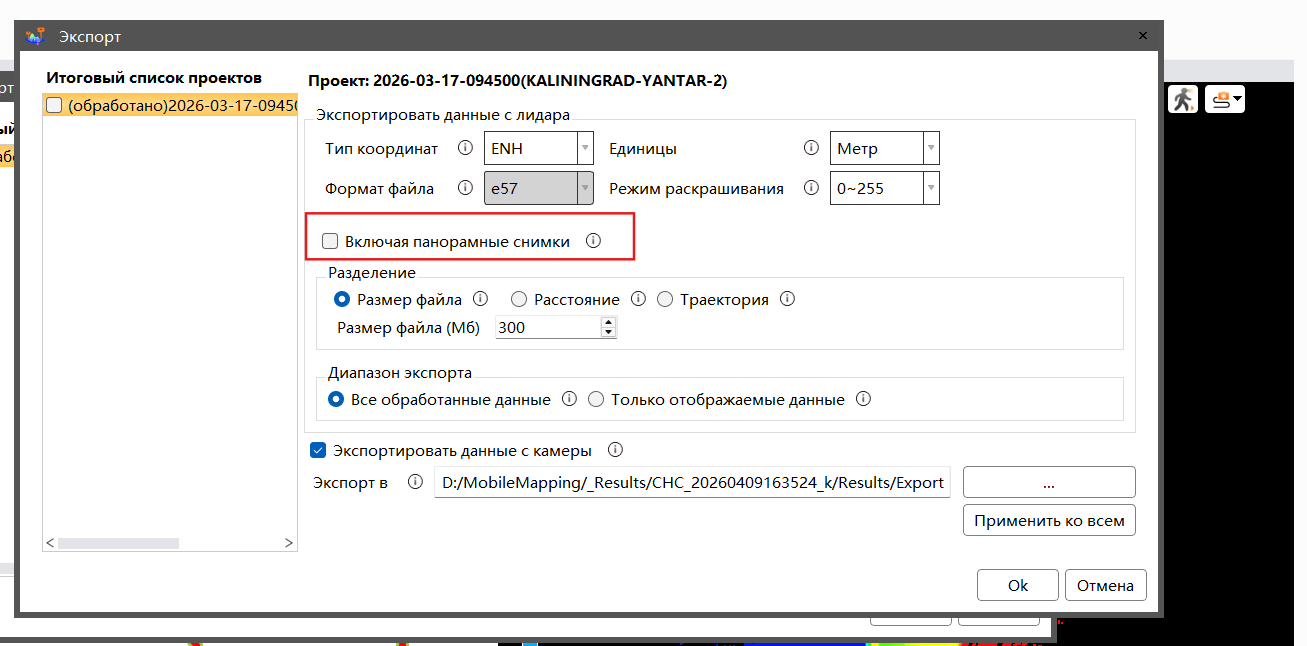
В случае с форматом e57 вы можете включить панорамные снимки, если вы использовали панорамную камеру при сканировании.
Остальные параметры экспорта
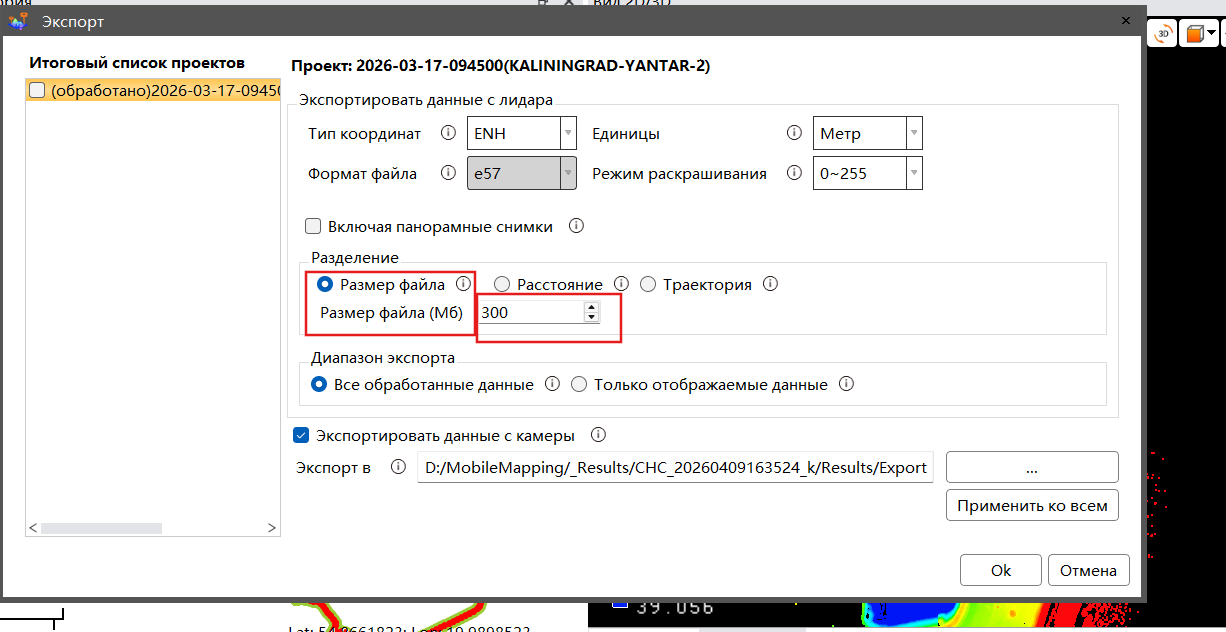
- Размер файла
Можно разделить итоговый файл, например, на части по 300 Мб, и тогда облако экспортируется кусками по 300 Мб, а не единым файлом, либо задать максимальную величину и выполнить экспорт одним файлом.
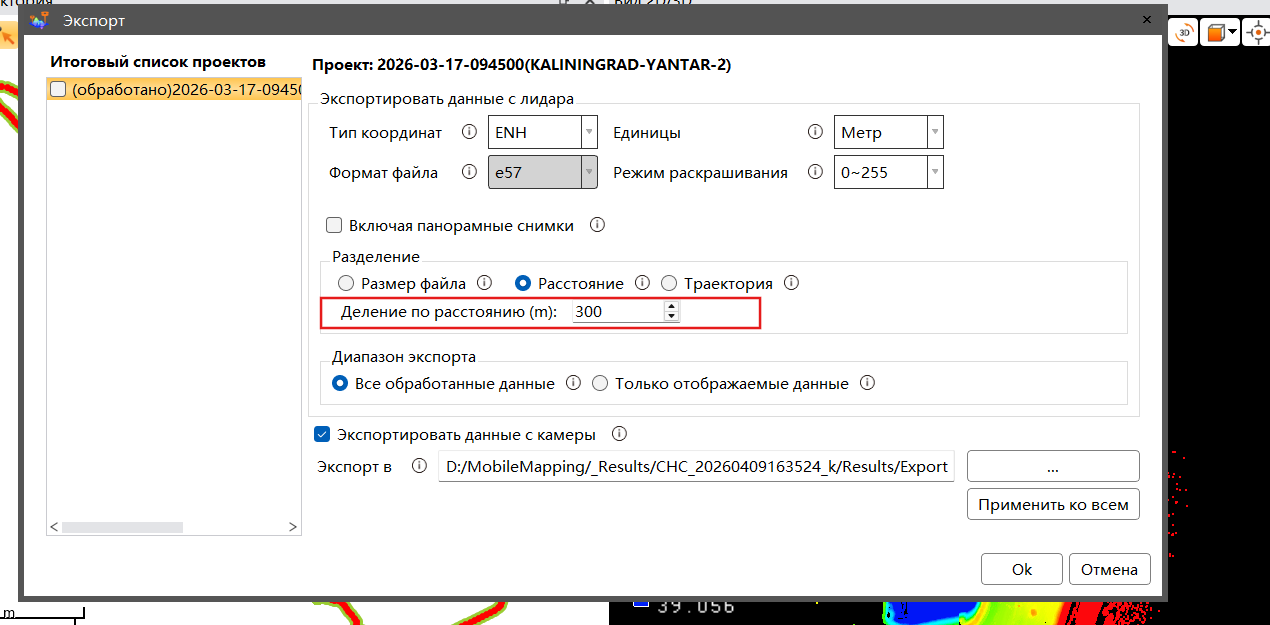
- Расстояние
Облако точек будет разбито на файлы, в каждом из которых будут данные с определенной длиной, например, по 300 метров. Обычно используется при установке сканера на автомобиль.
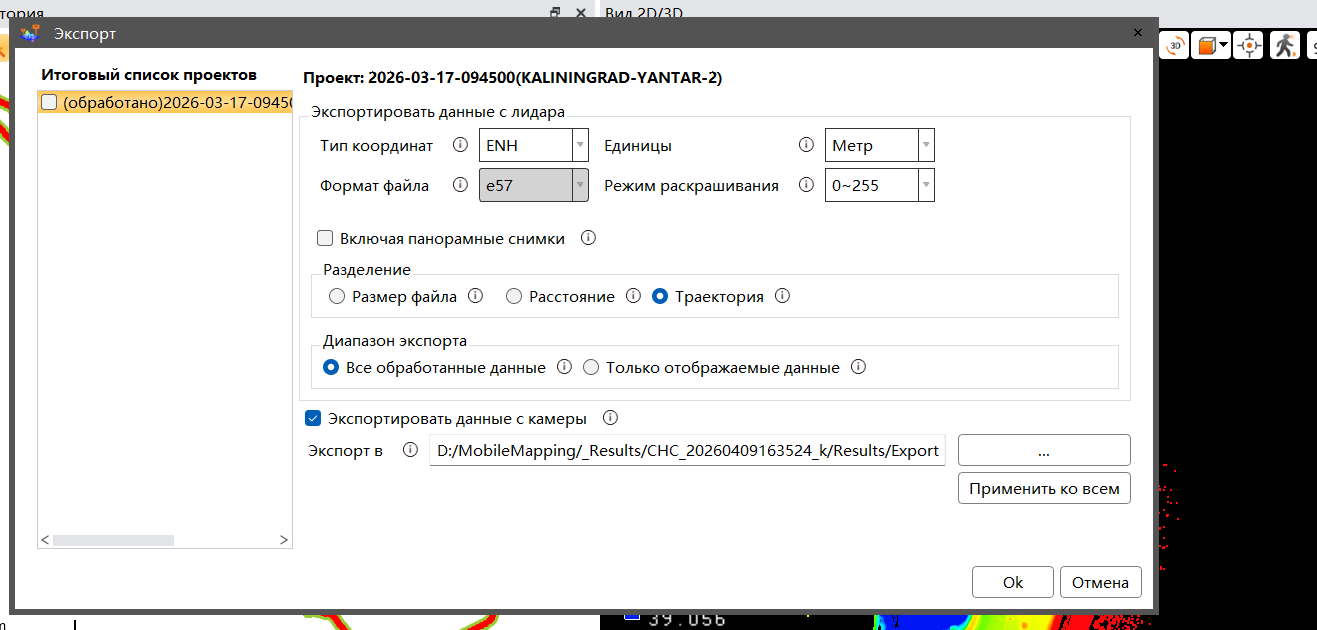
- Траектория
Обычно используется при воздушном лазерном сканировании, чтобы разделить облако точек по галсам. Например, если проект имеет четыре галса, не соединенные вместе, будет создано четыре файла облака точек.
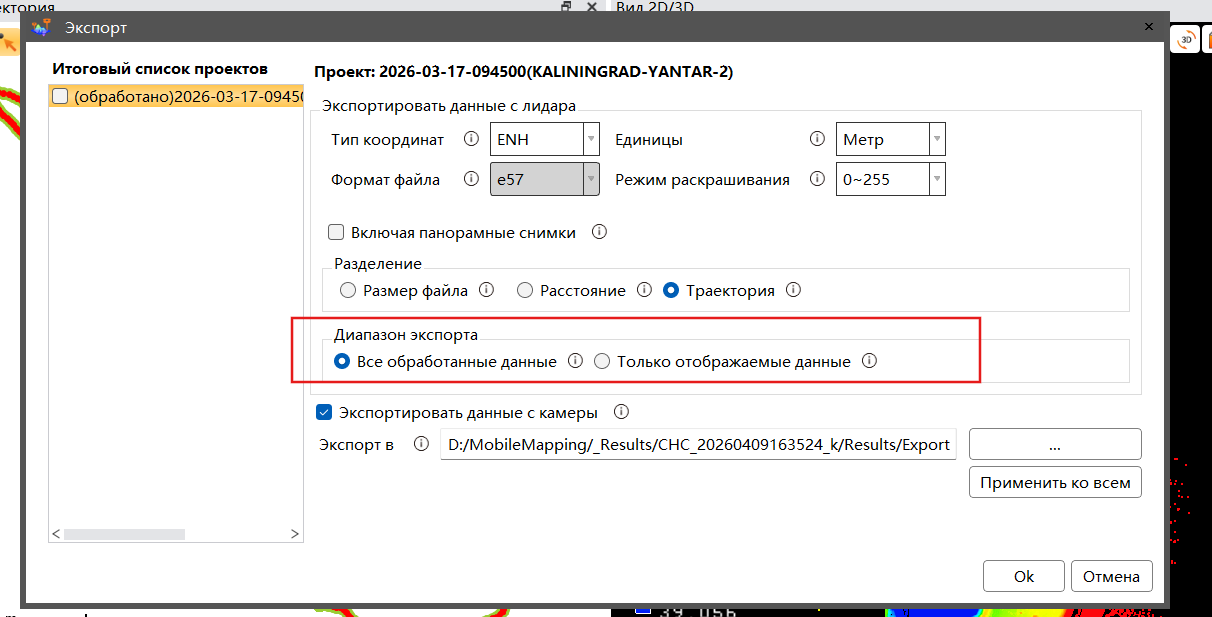
- Диапазон экспорта
Здесь доступны два варианта:
- Все обработанные данные;
- Только отображаемые данные, то есть экспорт данных, которые отображаются в окне 3D. Используется, если вы хотите экспортировать небольшой участок облака точек.
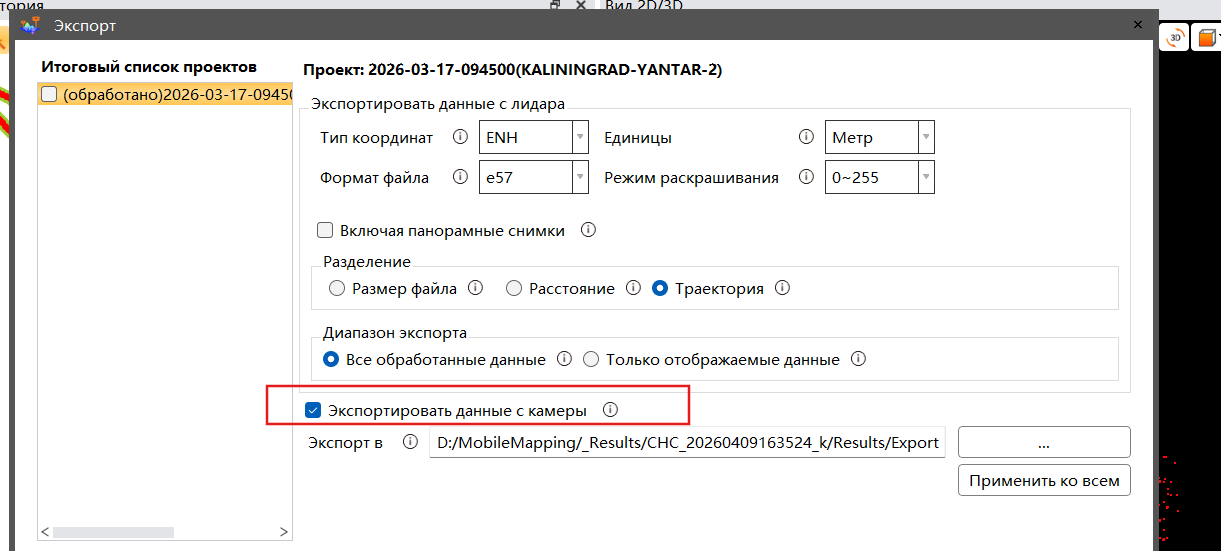
- Экспортировать данные с камеры
Экспорт снимков и траектории в указанный каталог в формате фотографий *.jpg и временным диапазоном, соответствующим облаку точек.
- Путь сохранения данных
Через пункт «Экспорт в» укажите путь, куда вы хотите сохранить свои данные.
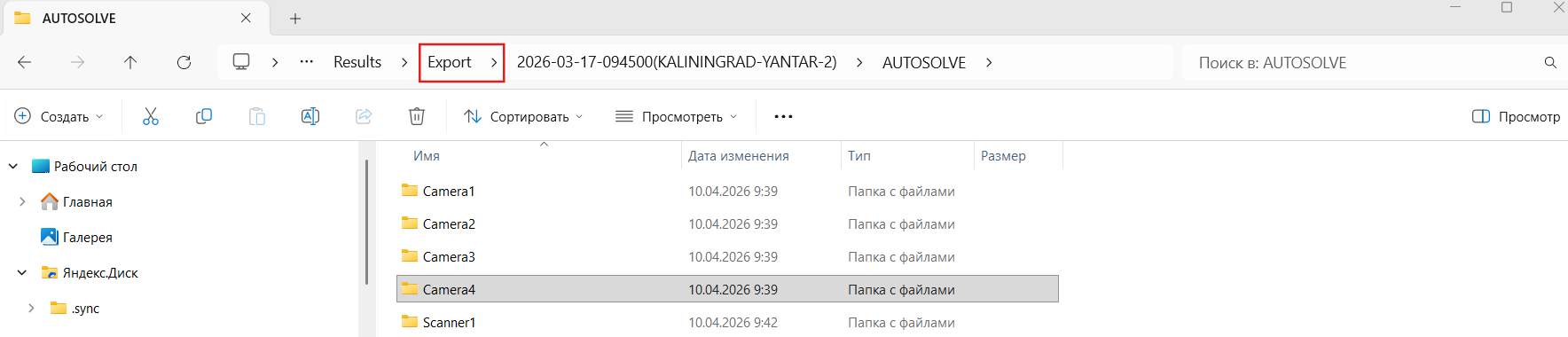
Итоговый результат
В папке с экспортом расположены фотографии и облака точек, где:
- Camera1, Camera2, Camera3 – снимки со встроенных камер RS10/RS10-32;
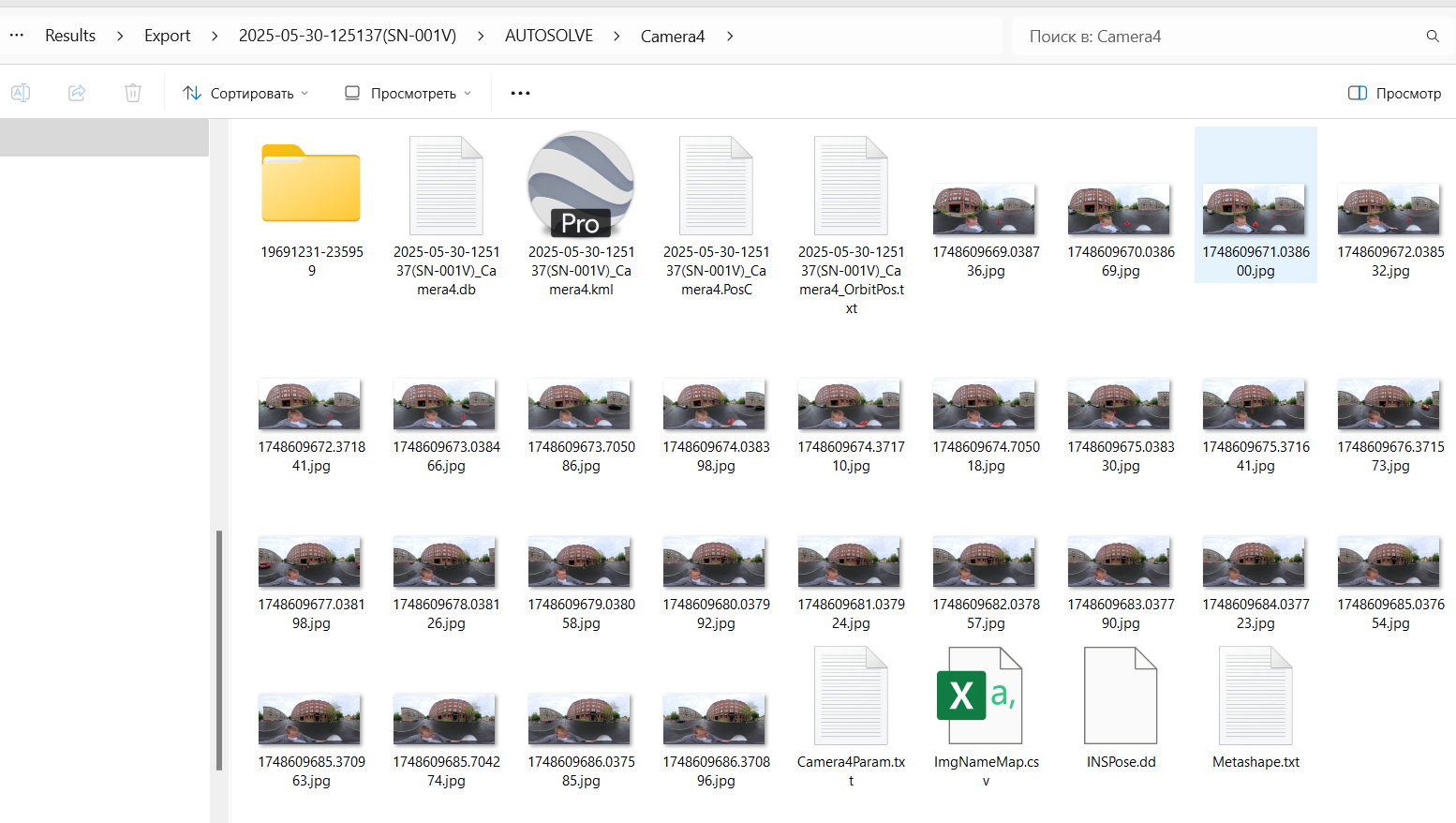
- Camera4 – снимки с Insta360;
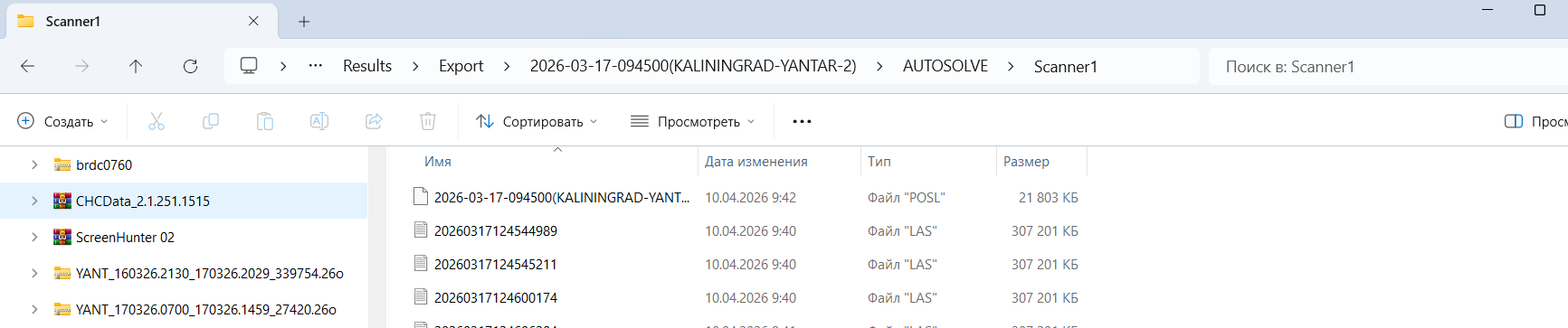
- Scanner1– лидарные данные.
В папку Camera экспортируются следующие данные:
- Снимки в формате jpg;
- Траектория в формате kml;
- Файлы с точными координатами центров снимков для привязки фотоизображений Metashape.txt, Camera*_OrbitPos.txt, Camera*_PosC (где звёздочка - номер камеры). ;Примечание: файл привязки можно использовать для импорта фотографий с привязкой в сторонние программы, например, ТИМ КРЕДО 3D СКАН, Agisoft Metashape и другие;
- CameraParam.txt, файл, в котором прописаны параметры камеры.
В папку Scanner1 экспортируются следующие данные:
- Траектория в формате PosL;
- Единое облако точек, либо облака точек, разделенные по размеру файла, по расстоянию или траектории.
Обращаем ваше внимание, что для экспорта облака(ов) точек в формат e57 или rcp, отдельный модуль к программному обеспечению CoPre2 докупать не нужно.